




แขนหุ่นยนต์ RW รองรับฟังก์ชั่นการวาง, การหยิบ, การหนีบ เซ็นเซอร์เป็นอุปกรณ์สามารถตรวจจับได้ว่าแผ่นเวเฟอร์มีแผ่นลามิเนตหรือชิ้นส่วนที่เอียงก่อนที่จะมีการฟิล์ม
Hiwin Robot Multi Axis Wafer RWS
หุ่นยนต์ไฮวิน Wafer Robot RWS

Feature | Hiwin Wafer Robot RWS
Specifications | Hiwin Wafer Robot RWS
*กำนดเองได้ *กำหนดเองได้
MODEL
RWS
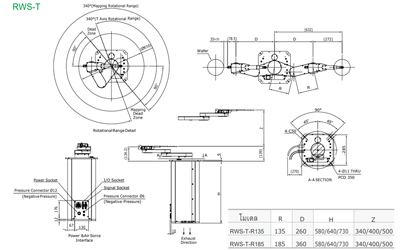
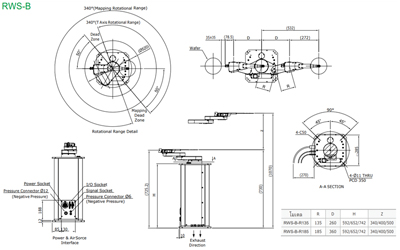
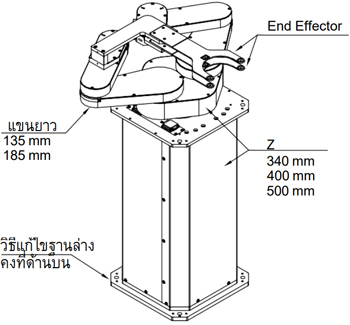
135 / 185 mm
ภาระโหลด
0.5 kg
R/W แกน
ความเร็ว
750 mm/sec
T แกน
ช่วงการหมุน
0 ~ 340 deg
ความเร็วเชิงมุม
250 deg/sec
Z แกน
ระยะแกน
340/400/500 mm
ความเร็ว
250 mm/sec
วิธีการล็อค
แก้ไขฐานล่าง / บนสุด
น้ำหนักหุ่นยนต์
45 – 55 kg ไม่วม ตู้คอนโทรล
ความสะอาด
Class 100
ความละเอียด
±0.02 mm
ช่องทางการสื่อสาร
RS232 / Ethernet
I/O
14 IN / 9 OUT
ความยาวลำตัว
5 m
แรงดันไฟฟ้า
200-240 V (AC) 1 เฟส
กระแสไฟฟ้า
5 A
แรงดันดูด
φ6 : -40 ~ -60 kPa
Model Table
RW
–
S
–
T
Z400
R135
–
Cta
–
F
–
M
–
T
หุ่นยนต์เวเฟอร์
–
ประเภทแขน
–
ประเภทคงที่
Z แกนขึ้นลง
แขนยาว
–
ชนิด
–
F
–
M
–
T
RW
–
S: แขนหนึ่งข้าง
D: ติดกริปเปอร์–
อยู่ระหว่าง
การทำข้อมูลZ340
Z400
Z500
R135
R185
–
Ata: ดูดแวคคั่ม
Cta: แคลมป์
Rta: งานพลิก–
F: งา
–
M: เซ็นเซอร์การ์ด
None: ไม่มี–
T: สอนทีช
None: ไม่มี
FORK (ความต้องการของลูกค้าสามารถเลือกตามตารางที่เหมาะสมกับงานที่จะใช้)
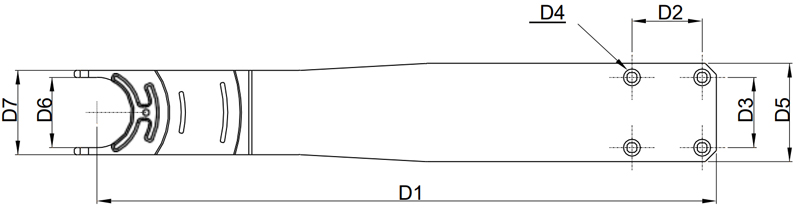
| รหัส | ขนาดเวเฟอร์ | การใช้งาน | D1 | D2 | D3 | D4 | D5 | D6 | D7 |
|---|---|---|---|---|---|---|---|---|---|
| F01 | 2″~4″ | ดูดด้วยแวคคั่ม | 220 | 25 | 25 | M3 | 35 | 25 | 30 |
| F02 | 8″~12″ | ดูดด้วยแวคคั่ม | 250 | 40 | 35 | M3 | 60 | 100 | 140 |
| F03 | 2″~8″ | ดูดด้วยแวคคั่ม | 199 | 25 | 25 | M3 | 35 | N/A | 23 |
| F04 | 2″~6″ | ดูดด้วยแวคคั่ม | 186 | 25 | 25 | M3 | 35 | N/A | 20 |
| F05 | 7″ | หนีบ | 155 | 35 | 35 | M3 | 50 | 60 | 144 |
| F07 | 8″ | หนีบ | 168 | 35 | 50 | M3 | 105 | 65 | 105 |
| F08 | 6″. 8″ | ดูดด้วยแวคคั่ม | 195 | 25 | 25 | M3 | 35 | 55 | 85 |
| F09 | 8″ | ดูดด้วยแวคคั่ม | 195 | 25 | 25 | M3 | 35 | 110 | 150 |
รีโมททีชชิ่ง
กรีปเปอร์ไฟฟ้า
ติดต่อ Hiwin, Linear Motion, Automation, Robot, System Intregration

