





ข้อมูลทางเทคนิค | Articulated robot – KR10 R1420 sixx
| KUKA | Articulated robot KR10 R1420 sixx | |
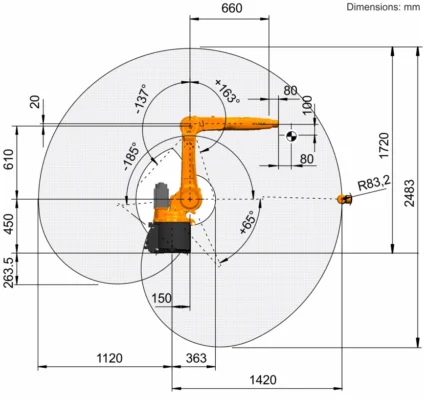
| ข้อมูลทางเทคนิค | ระยะเอื้อม | 1420 mm |
| น้ำหนักบรรทุกสูงสุด | – | |
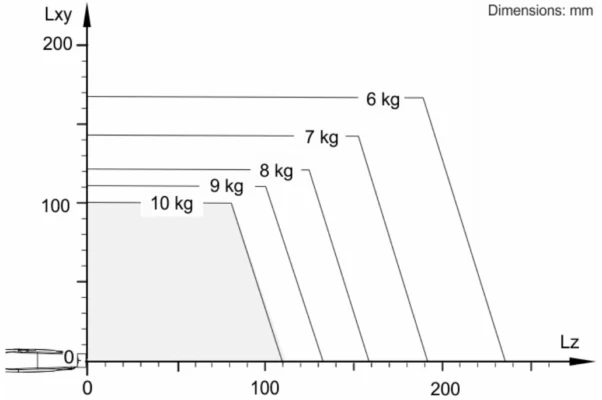
| พิกัดน้ำหนักบรรทุก | 10 kg | |
| จัดอันดับโหลดเสริมคอลัมน์หมุน / แขนลิงค์ / แขน | 0 / 0 / 10 kg | |
| ก่อให้เกิดการทำซ้ำ (ISO 9283) |
± 0.04 mm | |
| จำนวนแกน | 6 | |
| ตำแหน่งการติดตั้ง | Floor; Ceiliing; Wall; Desired angle | |
| Footprint | 333.5 x 307 mm | |
| น้ำหนัก | approx 160 kg | |
| ข้อมูลแกน | A1 (ช่วงการเคลื่อนไหว) | ±170 ° |
| A2 (ช่วงการเคลื่อนไหว) | -185 ° / 65 ° | |
| A3 (ช่วงการเคลื่อนไหว) | -137 ° / 163 ° | |
| A4 (ช่วงการเคลื่อนไหว) | ±185 ° | |
| A5 (ช่วงการเคลื่อนไหว) | ±120 ° | |
| A6 (ช่วงการเคลื่อนไหว) | ±350 ° | |
| A1 (ความเร็วกับน้ำหนักบรรทุกที่ได้รับการจัดอันดับ) | 220 ° / s | |
| A2 (ความเร็วกับน้ำหนักบรรทุกที่ได้รับการจัดอันดับ) | 210 ° / s | |
| A3 (ความเร็วกับน้ำหนักบรรทุกที่ได้รับการจัดอันดับ) | 270 ° / s | |
| A4 (ความเร็วกับน้ำหนักบรรทุกที่ได้รับการจัดอันดับ) | 381 ° / s | |
| A5 (ความเร็วกับน้ำหนักบรรทุกที่ได้รับการจัดอันดับ) | 311 ° / s | |
| A6 (ความเร็วกับน้ำหนักบรรทุกที่ได้รับการจัดอันดับ) | 492 ° / s | |
| อุณหภูมิโดยรอบระหว่างการทำงาน | 5 °C to 45 °C (278 K to 318 K) | |
| คะแนนการป้องกัน | IEC 60529 | IP54 |
| In-line wrist (IEC 60529) | IP54 | |
| การควบคุม | KR C4 smallsize-2 | |
| KR C4 compact | ||
| สอนจี้ | KUKA smartPAD | |
กราฟิกพื้นที่ทำงาน | Articulated robot – KR10 R1420 sixx
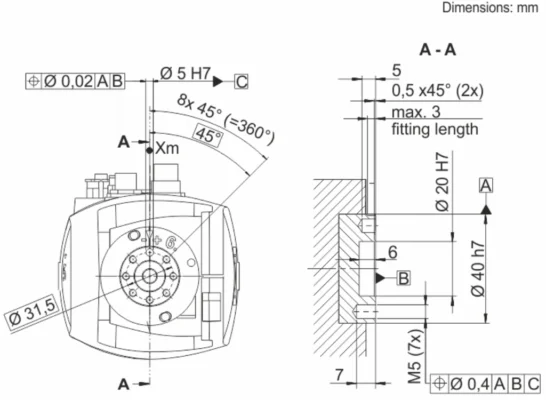
ติดตั้งหน้าแปลน | Articulated robot – KR10 R1420 sixx
คุณสมบัติ | Articulated robot – KR10 R1420 sixx
KR 10 R1420 ได้รับการออกแบบมาสำหรับน้ำหนักบรรทุก 10 กก. เพิ่มประสิทธิภาพการทำงานแบบไดนามิกของหุ่นยนต์ ด้วยศูนย์โหลดที่ลดลงระยะทางอาจใช้โหลดที่สูงขึ้นจนถึงน้ำหนักบรรทุกสูงสุดต้องตรวจสอบกรณีโหลดเฉพาะโดยใช้ KUKA.Load หากต้องการคำปรึกษาเพิ่มเติมโปรดติดต่อฝ่ายสนับสนุนของ KUKA
การบรรทุกน้ำหนัก | Articulated robot – KR10 R1420 sixx
รับน้ำหนักร่วมกรีปเปอร์ ไม่เกิน 10 กิโลกรัม ระยะเอื้อมในแนวนอนไปได้ไกลสุด 1420 มิลลิเมตร และระยะเอื้อมในแนวตั้งไปได้ไกลสุด 2483 มิลลิเมตร การใช้งาน หยิบจับ, ดูดชิ้นงานไปวาง, ตรวจสอบคุณภาพด้วยการติดกล้อง, หยิบเข้าเข้าเครื่อง และหยิบออกจากเครื่องจักร, ประกอบชิ้นงาน, หยิบบรรจุภัณฑ์
ติดต่อแผนก Robots ยี่ห้อ KUKA





