

ข้อมูลทางเทคนิค | Delta robot – KR3 D1200 HM
| KUKA | Delta robot – KR3 D1200 HM | |
|---|---|---|
| Technical data | ระยะเอื้อม | 600 mm |
| เส้นผ่านศูนย์กลางสูงสุด | 1200 mm | |
| ซองทำงาน | – | |
| น้ำหนักบรรทุกสูงสุด | 6 kg | |
| พิกัดน้ำหนักบรรทุก | 3 kg | |
| จำนวนแกน | 4 | |
| จำนวนแกนควบคุม | 4 | |
| ก่อให้เกิดการทำซ้ำ (ISO 9283) | ± 0.1 mm | |
| ตำแหน่งการติดตั้ง | เพดาน | |
| ขนาดฐาน | 1500 mm x 1500 mm | |
| น้ำหนัก | approx 95 kg | |
| สี | Stainless steel | |
| เสียงขณะทำงาน | < 75 dB (A) | |
| ระยะการเคลื่อนไหว | A1 | -120° / 40° |
| A2 | -120° / 40° | |
| A3 | -120° / 40° | |
| A4 | ±255° | |
| ความเร็วด้วยพิกัดน้ำหนักบรรทุก | A1 | 168°/s |
| A2 | 168°/s | |
| A3 | 168°/s | |
| A4 | 162°/s | |
| อุณหภูมิโดยรอบระหว่างการทำงาน | 0 °C to 45 °C (278 K to 318 K) | |
| ระดับการป้องกัน | IEC 60529 | IP67 |
| การควบคุม | KR C5 micro | |
| Teach pendant | KUKA smartPAD-2 | |
กราฟฟิกพื้นที่ทำงาน | Delta robot – KR3 D1200 HM
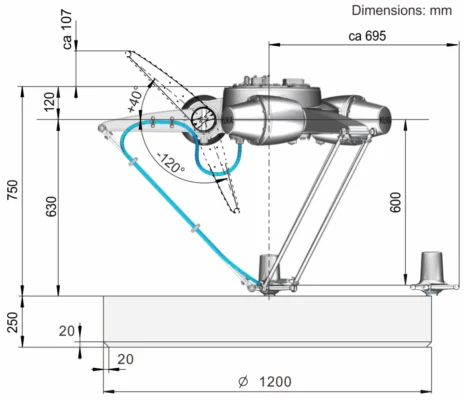
คุณสมบัติ | Delta robot – KR3 D1200 HM
รับน้ำหนักร่วมกรีปเปอร์ ไม่เกิน 3 กิโลกรัม ระยะเอื้อมในแนวนอนไปได้ไกลสุด 1200 มิลลิเมตร การใช้งานหยิบจับ, ดูดชิ้นงานไปวาง, ตรวจสอบคุณภาพด้วยการติดกล้อง, หยิบเข้าเข้าเครื่อง และหยิบออกจากเครื่องจักร, ประกอบชิ้นงาน, หยิบบรรจุภัณฑ์ เป็นต้น
การบรรทุกน้ำหนัก | Delta robot – KR3 D1200 HM
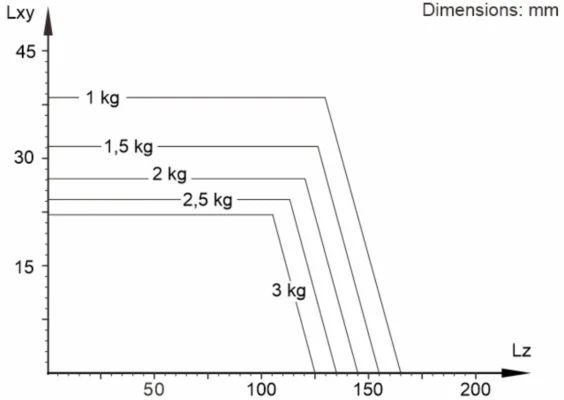
KR3 D1200 HM ได้รับการออกแบบมาสำหรับน้ำหนักบรรทุก 3 กก. เพื่อเพิ่มประสิทธิภาพการทำงานแบบไดนามิกของหุ่นยนต์ ด้วยระยะห่างของศูนย์รับน้ำหนักที่ลดลงอาจใช้โหลดที่สูงขึ้นจนถึงน้ำหนักบรรทุกสูงสุด ต้องตรวจสอบกรณีโหลดเฉพาะโดยใช้ KUKA.Load หากต้องการคำปรึกษาเพิ่มเติมกรุณาติดต่อ.
ติดต่อแผนก Robots ยี่ห้อ KUKA
