





ข้อมูลทางเทคนิค | Palletizer robot – KR 240 PA
| KUKA | หุ่นยนต์จัดเรียงพาเลท KR 240 PA | |
| ข้อมูลทางเทคนิค | ระยะเอื้อม | 3,195 |
| พิกัดน้ำหนักบรรทุก | 180 kg | |
| พิกัดโหลด, อาร์ม / ลิงค์อาร์ม / rot. คอลัมน์ | 50 kg / – / – | |
| พิกัดโหลด | 230 kg | |
| การทำซ้ำ | ±0.06 mm | |
| จำนวนแกน | 4 | |
| เพลากลวงในหน้าแปลนข้อมือ | 60 mm | |
| ตำแหน่งการติดตั้ง | พื้น | |
| ตัวแปร | อาร์กติก, HD | |
| ขนาดฐาน | 830 x 830 mm | |
| น้ำหนัก (ไม่รวมคอนโทรลเลอร์) ประมาณ | 1,103 kg | |
| ช่วงการเคลื่อนไหว | A1 | ± 185 ° |
| A2 | -5 ° / -140 ° | |
| A3 | 0 ° / 155 ° | |
| A6 | ± 350 ° | |
| อุณหภูมิโดยรอบ | หุ่นยนต์ | 0 °C ถึง +55 °C |
| Arctic | -30 °C ถึง +5 °C | |
| ระดับการป้องกันของหุ่นยนต์ในรุ่นมาตรฐาน | IP65 | |
| คอนโทรลเลอร์ | KR C4 | |
| การสอน | KUKA smartPAD | |
กราฟิกพื้นที่ทำงาน | Palletizer robot – KR 240 PA
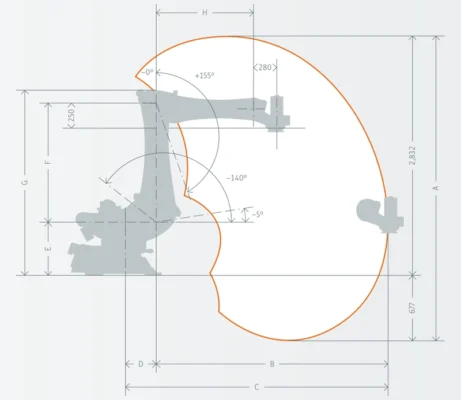
| A | B | C | D | E | F | G | H | Volume |
|---|---|---|---|---|---|---|---|---|
| 3509 | 2845 | 3195 | 350 | 675 | 1350 | 2215 | 1222 | 77.9 m3 |
รอบเวลา | Palletizer robot – KR 240 PA

KR 240 R3200PA (400 / 2000 / 400; 240 kg 50 kg supplementary load) 25.6 cycles / min
คุณสมบัติ | Palletizer robot – KR 240 PA
รับน้ำหนักร่วมกรีปเปอร์ ไม่เกิน 240 kg ระยะเอื้อมในแนวนอนไปได้ไกลสุด 3200 mm การใช้งานหยิบจับ, ดูดชิ้นงานไปวาง, ตรวจสอบคุณภาพด้วยการติดกล้อง, หยิบเข้าเข้าเครื่อง และหยิบออกจากเครื่องจักร, ประกอบชิ้นงาน, หยิบบรรจุภัณฑ์ เป็นต้น
ติดต่อแผนก Robots ยี่ห้อ KUKA





