




ข้อมูลทางเทคนิค | Articulated robot – DRV90L
| เดลต้า | หุ่นยนต์แบบข้อต่อ – DRV90L | |
|---|---|---|
| ช่วงการทำงาน สูงสุด | 900 มม. | |
| น้ำหนักบรรทุก สูงสุด | 7 กก. | |
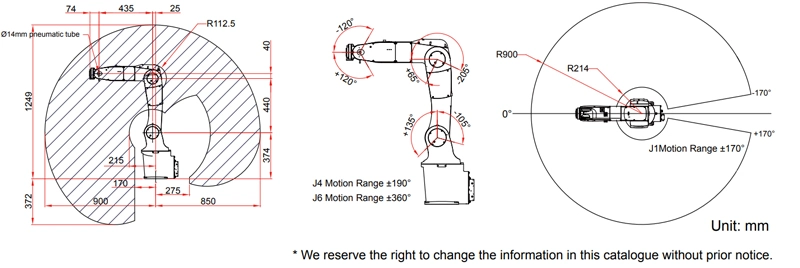
| ช่วงการเคลื่อนไหว | J1 | ± 170° |
| J2 | ± 135° / -105° | |
| J3 | ± 65° / -205° | |
| J4 | ± 190° | |
| J5 | ± 120 ° | |
| J6 | ± 360° | |
| ความเร็ว สูงสุด | J1 | 370°/วินาที |
| J2 | 260°/วินาที | |
| J3 | 410°/วินาที | |
| J4 | 550°/วินาที | |
| J5 | 545°/วินาที | |
| J6 | 1,000°/วินาที | |
| โมเมนต์ความเฉื่อย สูงสุด | J4 | 0.47 กก.•ม. 2 |
| J5 | 0.47 กก.•ม. 2 | |
| J6 | 0.15 กก.•ม. 2 | |
| ช่วงเวลา สูงสุด | J4 | 16.6 นิวตันเมตร |
| J5 | 16.6 นิวตันเมตร | |
| J6 | 9.4 นิวตันเมตร | |
| รอบเวลามาตรฐาน | 0.34 วิ | |
| ความสามารถในการทำซ้ำ | ± 0.03 มม. | |
| ระดับการป้องกัน | IP40 | |
| ลวดติดตั้งสำหรับการใช้งานของลูกค้า | อินพุตดิจิตอล 8 ตัวในตัว, โซลินอยด์ 3 ตัว, ท่อผู้ใช้ Ø6 1 ตัว | |
| รอยเท้า | ท่อลม (Ø6 x 2 เส้น) พร้อมขั้วต่อสำหรับงานหนัก | |
| สิ่งแวดล้อม | อุณหภูมิโดยรอบ | 0 – 40 C° |
| ความชื้น | 20 – 85% RH | |
| การสั่นสะเทือน | 0.5 กรัม | |
ขนาด | Articulated robot – DRV90L
คุณสมบัติ | Articulated robot – DRV90L
รับน้ำหนักร่วมกรีปเปอร์ ไม่เกิน 7 กิโลกรัม ระยะเอื้อมในแนวนอนไปได้ไกลสุด 909 มิลลิเมตร การใช้งานหยิบจับ, ดูดชิ้นงานไปวาง, ตรวจสอบคุณภาพด้วยการติดกล้อง, หยิบเข้าเข้าเครื่อง และหยิบออกจากเครื่องจักร, ประกอบชิ้นงาน, หยิบบรรจุภัณฑ์
ติดต่อแผนก Robots ยี่ห้อ DELTA

