





เลือกรุ่นสินค้า | SCARA robot – DRS50L
ตัวอย่าง: DRS50L6SS1BN002, DRS50L6SS1KN002
วิธีการเลือก: DRS(1) 50(2) L(3) 6(4) S(5) S(6) 1(7) B(8) N(9) 002(10)
- (1) = Company / Product / Robot type
- D = DELTA
- R = Robot
- S = SCARA
- (2) = Arm Length
- 50 = 500 mm
- (3) = Ievel
- L = Lite
- (4) = Max payload
- 6 = 6 kg
- (5) = Z-Axis Stroke (Horizontal)
- S = 200 mm
- O = 300 mm
- (6) = R-Axis Speed Reduction Ratio
- S = Standard (1/15)
- O = Optional (1/50)
- (7) = Generation
- A = CE
- 1 = 1 st Generation
- (8) = Controller
- B = Servo drive (Cable length 3 m)
- K = Servo drive (Cable length 5 m)
- (9) = Teach Pendant
- N = None
- (10) = Identification
- 002 = Standard 4 Axes
ข้อมูลทางเทคนิค | SCARA robot – DRS50L
| DELTA | DRS50L6SS1BN002 | DRS50L6SO1BN002 | DRS50L6OS1BN002 | |
|---|---|---|---|---|
| จำนวนแกน | 4 | |||
| การติดตั้ง | บนโต๊ะ | |||
| ระยะแขน (X + Y) | 500 mm | |||
| รับน้ำหนัก ปกติ / สูงสุด | 2 kg / 6 kg | |||
| ความเร็ว สูงสุด | J1 + J2 | 4400 mm / sec | ||
| J3 | 1100 mm / sec | |||
| J4 | 2000°/ sec | 600°/ sec | 2000°/ sec | |
| การเคลื่อนไหว | J1 | ±133° | ||
| J2 | ±153° | |||
| J3 | 200 mm | 200 mm | 300 mm | |
| J4 | ±360° | |||
| รอบการทำงาน* | 0.39 sec | |||
| การทำซ้ำ | J1 + J2 | ±0.015 mm | ||
| J3 | ±0.01 mm | |||
| J4 | ±0.01° | |||
| แรงผลัดกดัน ปกติ / สูงสุด (J3) | 150 / 350 N | |||
| โมเมนต์ความเฉื่อย ปกติ / สูงสุด (J4) | 0.01 kg•m2 | 0.07 kg•m2 | 0.01 kg•m2 | |
| สายไฟ | 15 Pin D-Sub | |||
| ท่อ | ø4 mm x 2, ø6 mm x 2 | |||
| น้ำหนัก (ไม่รวมตัวควบคุม) | 18.5 kg | |||
| สภาพแวดล้อม | อุณหภูมิ | 5ºC ~ 40ºC | ||
| การจัดเก็บ | -25ºC ~ 55ºC | |||
| ความชื้น | 0 ~ 90% RH (non-condensing) | |||
*When carrying a payload of 1 kg and reciprocating 25 mm in vertical and 300 mm in horizontal directions under an operating temperature of 25ºC and within a humidity of 45% ~ 65% RH (non-condensing).
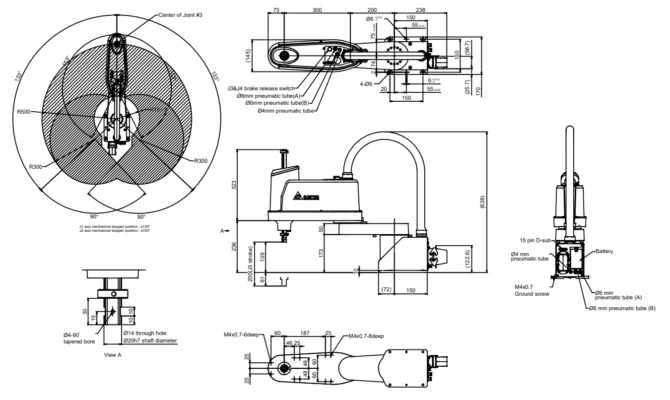
ขนาด | SCARA robot – DRS50L
คุณสมบัติ | SCARA robot – DRS50L
รับน้ำหนักร่วมกรีปเปอร์ ไม่เกิน 6 กิโลกรัม ระยะเอื้อมในแนวนอนไปได้ไกลสุด 500 มิลลิเมตร และระยะเอื้อมในแนวตั้งไปได้ไกลสุด 200 – 300 มิลลิเมตร การใช้งานหยิบจับ, ดูดชิ้นงานไปวาง, ตรวจสอบคุณภาพด้วยการติดกล้อง, หยิบเข้าเข้าเครื่อง และหยิบออกจากเครื่องจักร, ประกอบชิ้นงาน, หยิบบรรจุภัณฑ์
ติดต่อแผนก Robots ยี่ห้อ DELTA



