ข้อมูลทางเทคนิค | Articulated robot – IRB 4600-45/60 2.05
| ABB | Articulated robot | ||
|---|---|---|---|
| IRB 4600-45/2.05 | IRB 4600/60 2.05 | ||
| ข้อมูลจำเพาะ | ระยะ | 2.05 m | 2.05 m |
| น้ำหนักบรรทุก | 45 kg | 60 kg | |
| อาร์มโหลด | 20 kg | 20 kg | |
| จำนวนแกน | 6 + 3 ภายนอก (สูงสุด 36 กับ MultiMove) |
||
| การป้องกัน | มาตรฐาน IP67 เป็นตัวเลือก Foundry Plus 2 |
||
| การติดตั้ง | พื้น ชั้นวางของ คว่ำหรือเอียง | ||
| คอนโทรลเลอร์ | IRC5 ตู้เดี่ยว | ||
| ประสิทธิภาพ (ตามมาตรฐาน ISO 9283) |
การทำซ้ำตำแหน่ง | 0.05 mm | 0.06 m |
| ความสามารถในการทำซ้ำเส้นทาง | 0.13 mm | 0.46 m | |
| ข้อมูลทางเทคนิค | แหล่งจ่ายไฟ | 200 – 600 V, 50 – 60 Hz | |
| ทางกายภาพ | ฐานหุ่นยนต์ | 512 x 676 mm | 512 x 676 mm |
| ความสูงของหุ่นยนต์ | 1727 mm | 1727 mm | |
| น้ำหนักหุ่นยนต์ | 425 kg | 425 kg | |
| สิ่งแวดล้อม | ระหว่างดำเนินการ | + 5 °C (41 °F) to + 45 °C (113 °F) | |
| ระหว่างการขนส่งและการเก็บรักษา | – 25 °C (- 13 °F) to + 55 °C (131 °F) | ||
| ในช่วงเวลาสั้น ๆ (สูงสุด 24 ชั่วโมง) |
up to 70 °C (158 °F) | ||
| ความชื้นสัมพัทธ์ | สูงสุด 95 % | ||
| ความปลอดภัย | วงจรคู่พร้อมการควบคุม การหยุดฉุกเฉิน และฟังก์ชันความปลอดภัย อุปกรณ์เปิดใช้งาน 3 ตำแหน่ง | ||
| การปล่อยมลพิษ | ป้องกัน EMC / EMI | ||
| การเคลื่อนไหว | การเคลื่อนที่ของแกน: Axis 1 Rotation ระยะการทำงาน: + 180 ° to – 180 ° ความเร็วแกนสูงสุด: 175 ° / s |
||
| การเคลื่อนที่ของแกน: Axis 2 arm ระยะการทำงาน: + 150 ° to – 90 ° ความเร็วแกนสูงสุด: 175 ° / s |
|||
| การเคลื่อนที่ของแกน: Axis 3 arm ระยะการทำงาน: + 75 ° to – 180 ° ความเร็วแกนสูงสุด: 175 ° / s |
|||
| การเคลื่อนที่ของแกน: Axis 4 rotaion ระยะการทำงาน: + 400 ° to – 400 ° ความเร็วแกนสูงสุด: 250 ° / s |
|||
| การเคลื่อนที่ของแกน: Axis 5 bend ระยะการทำงาน: + 120 ° to – 125 ° ความเร็วแกนสูงสุด: 250 ° / s |
|||
| การเคลื่อนที่ของแกน: Axis 6 turn ระยะการทำงาน: + 400 ° to – 400 ° ความเร็วแกนสูงสุด: 360 ° / s |
|||
ระยะการทำงาน | Articulated robot – IRB 4600-45/60 2.05
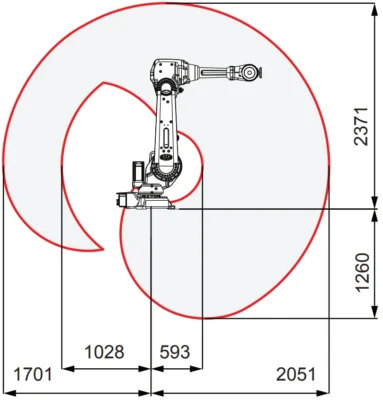
คุณสมบัติ | Articulated robot – IRB 4600-45/60 2.05
รับน้ำหนักร่วมกรีปเปอร์ ไม่เกิน 20 กิโลกรัม ระยะเอื้อมในแนวนอนไปได้ไกลสุด 1650 มิลลิเมตร และระยะเอื้อมในแนวตั้งไปได้ไกลสุด 3322 มิลลิเมตร การใช้งานหยิบจับ, ดูดชิ้นงานไปวาง, ตรวจสอบคุณภาพด้วยการติดกล้อง, หยิบเข้าเข้าเครื่อง และหยิบออกจากเครื่องจักร, ประกอบชิ้นงาน, หยิบบรรจุภัณฑ์
ติดต่อแผนก Robots ยี่ห้อ ABB