




ข้อมูลทางเทคนิค | Palletizer robot – LP130
| Nachi | หุ่นยนต์จัดเรียงสินค้า | ||||
|---|---|---|---|---|---|
| LP130-01 | LP130F | ||||
| จำนวนแกน | 4 | ||||
| ระยะการทำงาน สูงสุด | แขน | J1 | หมุน 1 | ±180° | |
| J2 | แนวนอน | -95~+41° | -94.5~+40.7° | ||
| J7 | หมุน2 | – | |||
| J3 | แนวตั้ง | -117~+17° | -116.9~+17.2° | ||
| ข้อมือ | J4 | การหมุน2 | ±360° | ||
| J5 | โค้งงอ | – | |||
| J6 | การหมุน 1 | – | |||
| ความเร็วสูงสุด | แขน | J1 | หมุน 1 | 130°/s | 145°/s |
| J2 | แนวนอน | 115°/s | |||
| J7 | หมุน2 | – | |||
| J3 | แนวตั้ง | 115°/s | |||
| ข้อมือ | J4 | การหมุน2 | 400 °/s | 535 °/s | |
| J5 | โค้งงอ | – | |||
| J6 | การหมุน 1 | – | |||
| โหลดสูงสุด | ข้อมือ | 130 kg | |||
| กำลังรับน้ำหนักของปลายแขน | 25 kg | ||||
| ส่วนบนของ J3 | – | ||||
| แรงบิดโหลดคงที่ สำหรับข้อมือ | J4 | การหมุน2 | – | ||
| J5 | โค้งงอ | – | |||
| J6 | การหมุน 1 | – | |||
| โมเมนต์ความเฉื่อยที่อนุญาตสำหรับข้อมือ | J4 | การหมุน2 | 50 kg•m2 | ||
| J5 | โค้งงอ | – | |||
| J6 | การหมุน 1 | – | |||
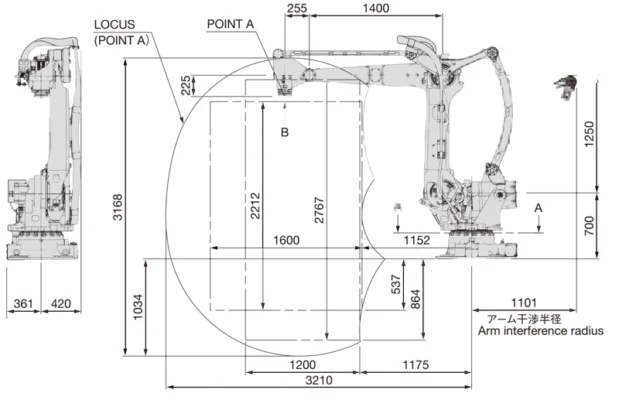
| ระยะสูงสุด | 3,210 mm | ||||
| ความสามารถในการส่งกลับตำแหน่ง | ±0.3 mm | ||||
| อุณหภูมิแวดล้อม*1 / ความชื้น | 0 ถึง 45°C / 20 ถึง 85%RH (ไม่มีการควบแน่น) | ||||
| การสั่นสะเทือน | 0.5 G หรือน้อยกว่า | ||||
| การติดตั้ง | ติดพื้น | ||||
| กันฝุ่น กันหยดน้ำ | – | ||||
| น้ำหนัก | 1,150 kg | ||||
| การใช้พลังงาน | 6.2 kVA | ||||
- * ใช้งานที่ระดับน้ำทะเล 1,000 ม. หรือต่ำกว่า อุณหภูมิแวดล้อมมีข้อ จำกัด เมื่อเกินระดับความสูงที่อนุญาต
- * ซอฟต์แวร์จำกัดช่วงแนวตั้งการดาวน์โหลดของแกน 5 ถึง ±5° แกน 4 สามารถเคลื่อนที่ได้ ±125° เมื่อหน้าจอแก้ไขตัวเข้ารหัสหรือหน้าจอการตั้งค่าขีดจำกัดซอฟต์แวร์เปิดอยู่เท่านั้น
- * การตั้งค่าเริ่มต้นคือ ±210° เมื่อส่งสายเคเบิลผ่านส่วนที่ตามมาของแกนที่ 6 ให้ใช้ช่วง ±210° เมื่อสายเคเบิลไม่ผ่าน ซองเปิดสามารถมีค่าสูงสุด ±360° ขึ้นอยู่กับเงื่อนไขการใช้งาน
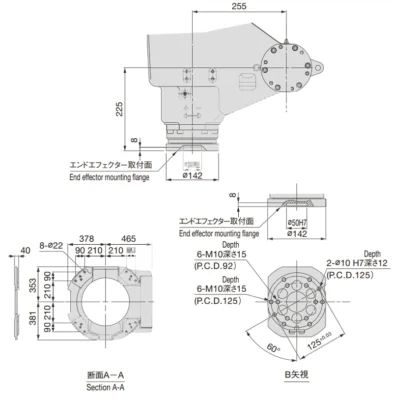
ขนาด | Palletizer robot – LP130

คุณสมบัติ | Palletizer robot – LP130
รับน้ำหนักร่วมกรีปเปอร์ ไม่เกิน 130 กิโลกรัม ระยะเอื้อมในแนวนอนไปได้ไกลสุด 3200 มิลลิเมตร การใช้งานหยิบจับ, ดูดชิ้นงานไปวาง, ตรวจสอบคุณภาพด้วยการติดกล้อง, หยิบเข้าเข้าเครื่อง และหยิบออกจากเครื่องจักร, ประกอบชิ้นงาน, หยิบบรรจุภัณฑ์
ติดต่อแผนก Robots ยี่ห้อ NACHI




